 |
|
|
|
||||||||||||||||









 톡톡
톡톡- > 전자키트
- > 프로세서/개발보드
- > Arduino(아두이노)
- > DFRobot
- 35KG, 360°, IP54
-
SER0067 High Torque Waterproof Digital Servo with Magnetic Encoder
상품번호 : 26231
INTRODUCTION
This is an exceptional high-torque, waterproof digital servo with a magnetic encoder, boasting a maximum torque of 35kg. It features a 12-bit high-precision magnetic encoder sensor that allows for precise and absolute control of the servo's position within a 360-degree range, ensuring unparalleled accuracy. With its improved linear motion capability, this servo provides unparalleled performance.
Internally, it utilizes a gear system made of reinforced steel gears with an optimized center distance of 2.0, ensuring durability and enhanced power transmission. The servo incorporates a dual ball bearing design for smoother operation and features an aluminum housing that enhances its heat dissipation capabilities, resulting in a longer lifespan.

Additionally, this servo is equipped with electronic and temperature protections, ensuring a safer user experience. In the event of a servo lock-up, it automatically triggers a protective torque output when the torque exceeds the overload capacity for a continuous period of 4 seconds. Moreover, should the servo's temperature surpass 70 degrees, it ceases torque output, only to resume once the temperature drops below 70 degrees.

To enhance its water resistance, the servo's joints are fortified with waterproof gaskets, and the circuit board is coated with a waterproof varnish. Both the motor and the potentiometer are sealed with a specialized adhesive. These measures contribute to the servo's exceptional waterproof capabilities. Moreover, this servo is accompanied by a selection of different-shaped servo horns, enabling its application in a wider range of environments.


Interface Definition Diagram

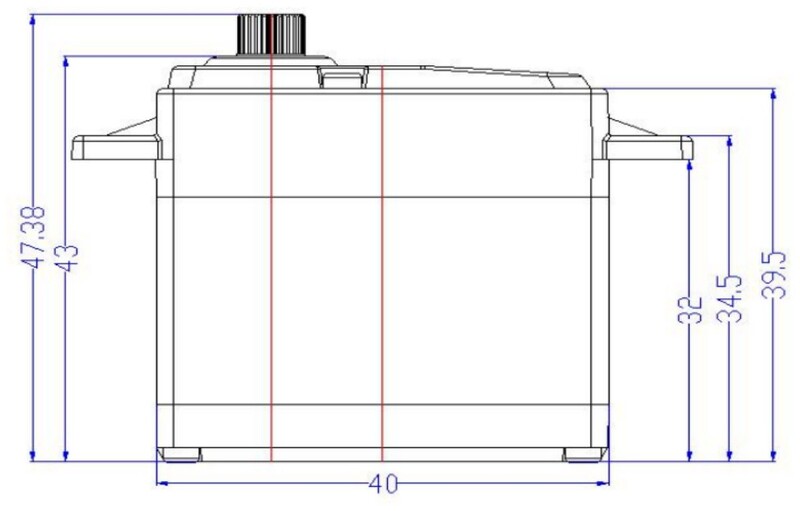
Dimensional Diagram
This is an exceptional high-torque, waterproof digital servo with a magnetic encoder, boasting a maximum torque of 35kg. It features a 12-bit high-precision magnetic encoder sensor that allows for precise and absolute control of the servo's position within a 360-degree range, ensuring unparalleled accuracy. With its improved linear motion capability, this servo provides unparalleled performance.
Internally, it utilizes a gear system made of reinforced steel gears with an optimized center distance of 2.0, ensuring durability and enhanced power transmission. The servo incorporates a dual ball bearing design for smoother operation and features an aluminum housing that enhances its heat dissipation capabilities, resulting in a longer lifespan.
Additionally, this servo is equipped with electronic and temperature protections, ensuring a safer user experience. In the event of a servo lock-up, it automatically triggers a protective torque output when the torque exceeds the overload capacity for a continuous period of 4 seconds. Moreover, should the servo's temperature surpass 70 degrees, it ceases torque output, only to resume once the temperature drops below 70 degrees.
To enhance its water resistance, the servo's joints are fortified with waterproof gaskets, and the circuit board is coated with a waterproof varnish. Both the motor and the potentiometer are sealed with a specialized adhesive. These measures contribute to the servo's exceptional waterproof capabilities. Moreover, this servo is accompanied by a selection of different-shaped servo horns, enabling its application in a wider range of environments.
Interface Definition Diagram
Dimensional Diagram
APPLICATIONS
Build robots Driving part of various automated equipment
SPECIFICATION
Electrical characteristics
Operating Voltage: 5-8.4V No-Load Speed: 0.238sec/60°(42RPM)@6V,0.192sec/60°(52RPM)@7.4V Operating Current: 150mA@6V,180mA@7.4V Stall Torque: 28.8kg.cm/400.65oz.in@6V,35.5kg.cm/493.86oz.in@7.4V Stall Current: 3.2A@6V,3.9A@7.4V Static Current: 6mA Rated Load: 9.5kg.cm@6V,11.8kg.cm@7.4V Rated Current: 1000mA@6V,1200mA@7.4V Kt Constant: 10kg.cm/A
Control characteristics
Control Signal: PWM Angle: 360° (at 500→2500µsec) Angle Difference: ≤1° Return Difference: ≤1° Neutral Position: 1500µsec Dead Band Width: ≤4µsec Rotation Direction: Counterclockwise (from 1500 → 2000µsec) Pulse Width Range: 500→2500µsec Signal High Voltage: 2-5V Signal Low Voltage: 0-0.45V Signal Period: 20ms
Mechanical specifications
Casing Material: PA+Aluminum Gear Material: Steel Bearing Type: Ball Bearing Output Shaft: 25T/5.9mm Reduction Ratio: 1/275 Gear Backlash: ≤0.5° Arm Backlash: 0° Output Shaft Screw: M3X6
Mechanical specifications
Motor Noise: 45±5dB Servo No-Load Noise: 65±5dB Waterproof Rating: IP54 (splash-proof) Electronic Protection: 4 seconds lock-up Temperature Protection: >70°C Storage Temperature: -30°C~80°C Operating Temperature: -20°C~60°C
Electrical characteristics
Control characteristics
Mechanical specifications
Mechanical specifications
SHIPPING LIST
Metal Magnetic Encoder Servo-35KG 360° x1 Metal Servo Arm x1 Servo Horn Accessories Pack x1

-
-
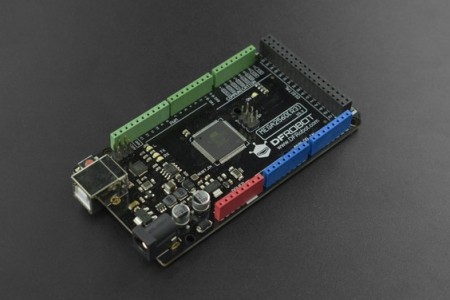
- DFRduino Mega Kit
- 디에프알두이노 메가 키트
- 판매가 184,800원
-

-
- DFR0191 DFRduino Mega2560 (Arduino Mega 2560 R3 Compatible)
- 디에프알두이노 메가2560, 아두이노 메가2560 보드와 호환 제품
- 판매가 49,770원
-
- SEN0578 DFRobot LakiBeam 1L - 270 Degree Industrial-grade Single-line 2D ToF LiDAR
- 40m, 12V, Ethernet UDP, IP65
- 판매가 849,000원
-
-
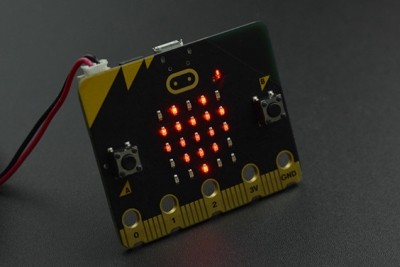
- BBC micro:bit V2
- 마이크로:비트 보드
- 판매가 27,500원
-

-
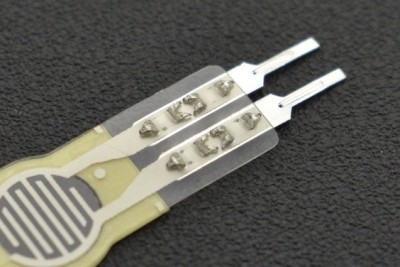
- SEN0297 RP-C7.6-ST Thin Film Pressure Sensor
- 직경 7.6mm의 짧은 다리의 원형 유연한 박막 압력 센서로, 고감도 압력 감지를 실현하는 데 사용할 수 있습니다.
- 판매가 4,500원
-
-
- DFR0536 micro:GamePad - GamePad for micro:bit (V4.0)
- micro:bit V4.0 용 GamePad 는 조이스틱이 있는 micro:bit 게임패드입니다
- 판매가 36,800원
-
-
- DFR0529 Fermion: 2.2 inch TFT SPI Interface LCD Display (Breakout)
- 3.3V~5.5V의 입력전압을 가지는 2.2” TFT LCD Display Module 로 다채로운 패턴과 문자를 표시하는데 사용됩니다.
- 판매가 25,300원
-
-
- DFRobot ROB0183 Six-axis Robotic Arm (Based on a Raspberry Pi) With Flat Base
- Robotics Artificial Intelligence Hardware
- 판매가 1,627,800원
-
-
- DFR0660 GM65 QR & Barcode Scanner Module
- 이 GM65 코드 스캐너 모듈은 어두운 환경에서도 고속(약 1초)으로 종이나 화면의 바코드 또는 QR 코드를 정확하게 읽을 수 있습니다.
- 판매가 84,530원
-
-





관련상품
-
-
- DFR1142 Lite Carrier Board for LattePanda Mu Compute Module
- USB 3.0, Ethernet, PCIe 3.0, M.2 M key, HDMI
- 판매가 48,000원
-
-
- DFR1146-1 LattePanda Mu - A Micro x86 Compute Module powered by Intel Processor N100
- Full-Function Evaluation Carrier, Active Cooler
- 판매가 470,000원
-
-
- DFR1146 LattePanda Mu - A Micro x86 Compute Module powered by Intel Processor N100
- Lite Carrier, Active Cooler
- 판매가 370,000원
-
-
- SEN0605 MODBUS-RTU RS485 Soil NPK Measure Sensor
- IP68, 5-30V
- 판매가 81,000원
-
-
- SEN0602 MODBUS-RTU RS485 Soil Temperature, Humidity and pH Monitoring Sensor
- IP68, 5-30V
- 판매가 81,000원
-
-
- SEN0601 MODBUS-RTU RS485 Soil Moisture, Temperature & EC Sensor
- IP68, 5-30V
- 판매가 53,000원
-









2. 해외구매 특성상 주문에서 배송까지는 평균 10~15일이 소요됩니다. 간혹 현지 제품 수급에 따라 부득이하게 시일이 더 소요 될 수 있으니 구매시 좀 더 여유있게 주문하시길 권합니다.
3. 해외 내수품인 관계로 A/S에 대해서는 별도의 책임을 지지 않습니다.
4. 해외배송 특성상 주문접수후 배송상태가 배송준비중으로 넘어간 경우 해외에서 국내로의 배송이 이루어지고 있다는 뜻입니다. 따라서 배송준비중으로 배송상태가 넘어간 경우 취소및 반품이 불가하므로 이점 양해 부탁드립니다.
5. 타 해외구매대행 사이트에서 주문하신 물건과 주문날짜가 겹치지않도록 주의해 주십시오. 통관날짜가 같을 경우 합산관세가 부가되게 됩니다.
|